
L’Électron
Présentation de la particule élémentaire "e" Les électrons sont des particules fondamentales qui orbitent autour du noyau d'un atome. Leur principal rôle est de participer aux interactions électromagnétiques, formant ainsi des liaisons chimiques entre les atomes pour créer des molécules. 📺 De plus, les électrons sont essentiels au fonctionnement des dispositifs électroniques, car leur mouvement[…]
28 March 2024 ∙ 7 minutes de lecture

Le Moteur de Stirling et son Fonctionnement
Comment se font les cycles des gaz dans le moteur ? 🔥 Le moteur Stirling est un dispositif thermodynamique fonctionnant selon le principe de la compression et de la détente cyclique d'un gaz, sans combustion interne. Il convertit l'énergie thermique en énergie mécanique, utilisant une source chaude et une source froide pour effectuer un travail[…]
30 January 2024 ∙ 8 minutes de lecture

Le Pouvoir Rotatoire des Substances Optiquement Actives
Qu'est-ce que la loi de Biot et comment l'utiliser ? ➡️ La loi de Biot, également connue sous le nom de loi de Biot-Savart, est une loi fondamentale en électromagnétisme qui décrit le champ magnétique créé par un courant électrique constant dans un conducteur. Elle a été développée indépendamment par les physiciens français Jean-Baptiste Biot[…]
23 January 2024 ∙ 4 minutes de lecture

Le Sodium
Tout savoir sur le Sodium ✅ Le sodium est un élément chimique métallique de symbole Na et de numéro atomique 11. Il appartient à la famille des métaux alcalins. Le sodium réagit violemment avec l'eau, formant de l'hydroxyde de sodium et dégageant de l'hydrogène gazeux. Il est essentiel à la vie, car il joue un[…]
22 December 2023 ∙ 5 minutes de lecture

La Nature des Trajectoires du Mouvement en Physique
Trajectoires : que contient le programme de PCSI de mécanique ? ? En physique, la trajectoire désigne le chemin suivi par un objet en mouvement dans l'espace au fil du temps. Elle peut être décrite mathématiquement et dépend des forces agissant sur l'objet. ? La forme de la trajectoire varie en fonction des conditions initiales[…]
21 December 2023 ∙ 12 minutes de lecture

L’Équation de d’Alembert unidimensionnelle
Comment se manifeste l'équation des ondes 1D, dite "de d'Alembert" ? L'équation de d'Alembert est une équation aux dérivées partielles qui apparaît dans le contexte des équations d'ondes en physique mathématique. Elle est utilisée pour décrire la propagation d'une onde dans un milieu continu, comme une corde vibrante ou une membrane élastique. 👨🏫 L'équation de[…]
27 November 2023 ∙ 7 minutes de lecture

Les Spectres Continus
Le spectre continu : origine, définition et usage 🔦 Le spectre continu est un spectre lumineux composé de rayonnements électromagnétiques dont les longueurs d'onde varient de manière continue : Cela implique qu'il ne s'achève pas de manière brutale à ses extrémités, mais qu'à ces dernières l'intensité des radiations décroit progressivement jusqu'à être nulle Cela suppose[…]
23 November 2023 ∙ 5 minutes de lecture
Nucléons – Définition et Caractéristiques
Définition et caractéristiques des nucléons "Nucléon" est un terme qui trouve son origine dans le mot latin "nucléus", signifiant "noyau". Les nucléons sont les particules qui constituent le noyau atomique. Il en existe deux sortes : les protons et les neutrons. ⚛️ Les nucléons sont des particules, non élémentaires, qui peuvent : Être chargées positivement,[…]
21 November 2023 ∙ 5 minutes de lecture

L’Ununpentium, moscovium ou élément 115
Quelles sont les caractéristiques de l'ununpentium, aussi appelé moscovium ou élément 115 ? L'ununpentium (Uup) est un élément chimique qui porte le numéro 115 dans la classification périodique des éléments. Voici l'emplacement de l'ununpentium dans le tableau périodique des éléments ! Un peu d’histoire autour de l'ununpentium Le nom donné par l'UICPA est un nom latin[…]
17 November 2023 ∙ 4 minutes de lecture

Le Potassium
Quelles sont les caractéristiques du potassium, l'élément chimique numéro 19 ? L'ion potassium, noté K+, est un cation monoatomique positif issu de l'élément chimique potassium (symbole K) situé dans le tableau périodique des éléments. Le potassium a un numéro atomique de 19, ce qui signifie qu'un atome de potassium a 19 protons dans son noyau.[…]
7 November 2023 ∙ 3 minutes de lecture

La Vitesse de Déplacement
Vitesse, distance, temps : comment les mesurer ? La mesure de la vitesse, de la distance et du temps est essentielle pour comprendre et quantifier les déplacements dans divers contextes, que ce soit en sciences, en transport, ou dans la vie quotidienne. Pour calculer la Vitesse (V), on utilise la formule Vitesse = Distance /[…]
6 November 2023 ∙ 6 minutes de lecture

Liste des Formules Chimiques des Molécules
Quels sont les différents composants de chaque molécule ? Les molécules chimiques possèdent toutes une formule qui permet de les reconnaître, les identifier et les distinguer des autres molécules. Lesquelles sont à retenir en priorité ? 👍 Découvrez-le dans notre article En résumé : dix formules à retenir 🔟 💧 Il y a de nombreuses[…]
20 October 2023 ∙ 8 minutes de lecture

L’Année de Lumière
Définition et calcul de l'année de lumière Une année-lumière est une distance considérable, particulièrement quand elle est bissextile. Marc Escayrol L'année lumière (symbole : al) est une unité de mesure de distance utilisée en astronomie. Elle représente la distance parcourue par la lumière dans le vide en une année. Comprendre ce que représente une année[…]
19 October 2023 ∙ 8 minutes de lecture
Diagramme Objet-Action
Bilan des actions mécaniques : construction d'un diagramme objet-action Au commencement était l'action Johann Wolfgang von Goethe Dans la vie de tous les jours, lorsqu'un objet agit sur un autre objet, on dit qu'une action mécanique s'exerce. De plus, sur un même objet, plusieurs actions mécaniques peuvent s'appliquer. Qu'il s'agisse du vent sur la voile[…]
3 October 2023 ∙ 6 minutes de lecture

Les Chiffres Significatifs
Définition des chiffres significatifs et applications 🤔 Les chiffres significatifs sont une notion fondamentale en chimie, en physique et dans d'autres domaines scientifiques. Ils servent à exprimer la précision avec laquelle une mesure a été effectuée : Les chiffres significatifs indiquent la fiabilité d'une valeur numérique Ils permettent de comprendre l'incertitude associée à une mesure En[…]
28 September 2023 ∙ 7 minutes de lecture

La Longueur d’Onde
Tout savoir sur la longueur d'onde Que ce soit pour parler de son fonctionnement ou sa manifestation dans notre quotidien, découvrez la longueur d'onde sous toutes ses formes dans cet article. Résumé sur les ondes ⚛️ 🔉 Une onde est une déformation qui se propage dans un milieu, qu'il soit matériel ou non. Il existe[…]
27 September 2023 ∙ 7 minutes de lecture

Les Atomes et Leurs Symboles
Les éléments du tableau périodique Rien n'est indifférent, rien n'est impuissant dans l'univers ; un atome peut tout dissoudre, un atome peut tout sauver ! Gérard de Nerval L'atome... on en parle beaucoup, mais on n'en connaît pas toujours très bien la définition. De façon simple, on pourrait dire que l'atome est une particule qui[…]
21 September 2023 ∙ 3 minutes de lecture

Tout Savoir sur le Nombre de Reynolds en Physique
Nombre de Reynolds - Comment décrire un écoulement par le calcul ? Problématique Il y a nécessité de décrire les écoulements afin d'interpréter ou prévoir les effets mécaniques de ces écoulements (écoulement dans une canalisation, écoulement autour d'un objet fixe, écoulement relatif autour d'un objet qui avance dans un fluide) : on utilise un coefficient[…]
21 September 2023 ∙ 6 minutes de lecture

Ordre de Grandeur : Définition et Concept en Mathématique
Qu'est-ce qu'un Ordre de Grandeur ? Généralités sur la notion d'ordre de grandeur Ordre de grandeur et langage courant L'expression "ordre de grandeur" est souvent utilisée comme un synonyme du terme "approximation". Dans le langage courant, lorsqu'on demande de donner un ordre de grandeur pour une dimension, pour une distance ou pour une autre grandeur[…]
21 September 2023 ∙ 4 minutes de lecture

Le Débit Massique en Physique
Quelles sont les équations de conservation de la masse ? Le débit massique est une mesure de la quantité de matière qui traverse une section donnée d'un système, par unité de temps. 💦 Il représente la masse de substance transportée, telle que liquides, gaz ou particules, et est exprimé en kg/s ou g/s Ce concept[…]
28 August 2023 ∙ 9 minutes de lecture

L’éléments Cuivre et ses Transformations
L'élément Cu et ses composés Découvrir le cuivre 🧑🏭 Le cuivre se retrouve dans notre quotidien L'élément cuivre (Cu) occupe une place remarquable dans le tableau périodique en tant que métal de transition du groupe 11. 🧑🏼🏫 Le Cuivre comprend le symbole chimique "Cu" provenant du mot latin "cuprum" Le cuivre est un élément essentiel[…]
28 July 2023 ∙ 6 minutes de lecture
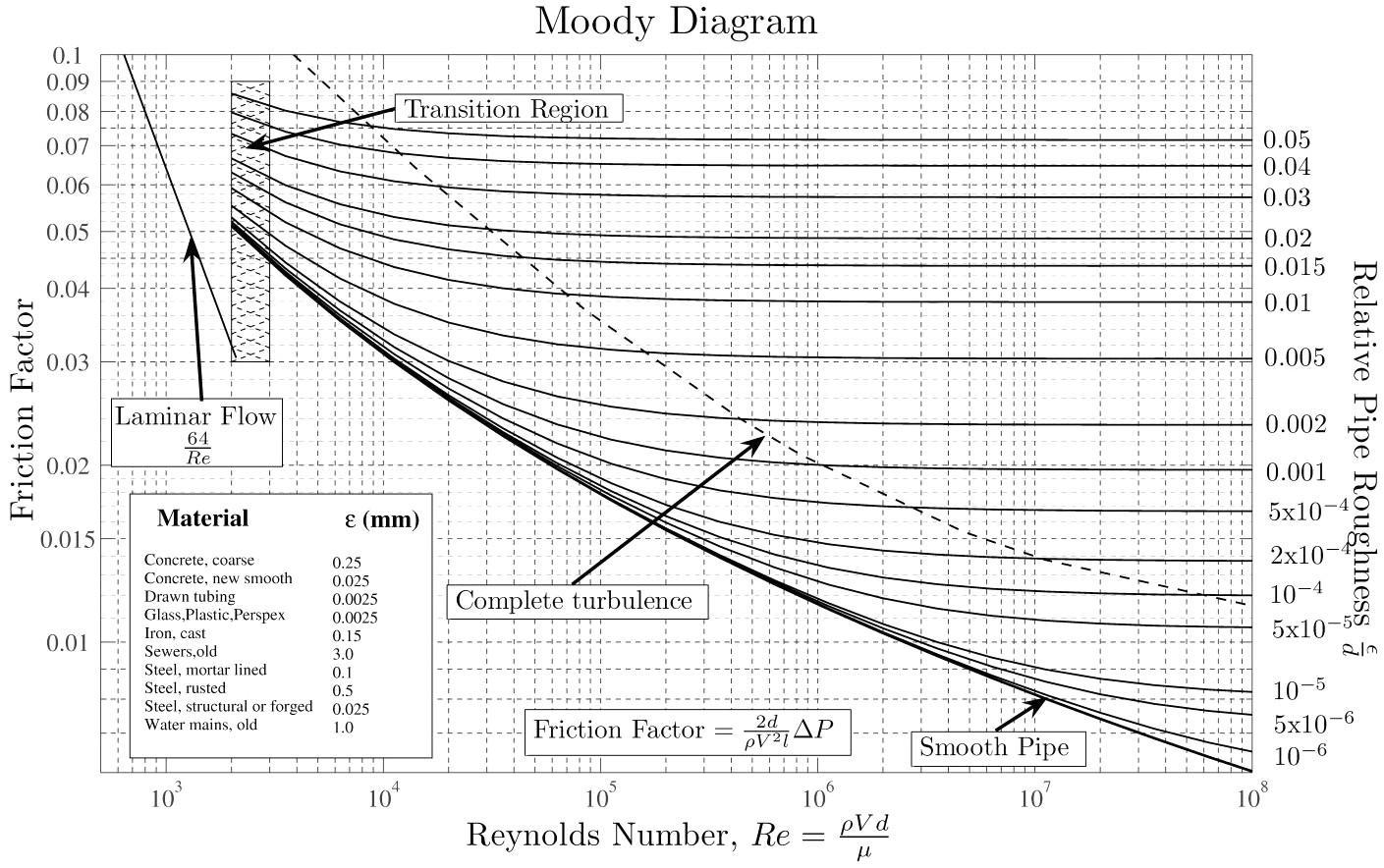
Le Diagramme de Moody/Colebrook
Quelle est l'utilité du graphique de Moody ? Le diagramme de Moody est un outil puissant pour analyser les écoulements en conduites en reliant : Le facteur de friction (f) Le nombre de Reynolds (Re) La rugosité relative (ε/D) 🧠 Cet outil visuel permet aux ingénieurs de prendre des décisions éclairées lors de la conception,[…]
26 July 2023 ∙ 7 minutes de lecture

La Vitesse de la Lumière : Tout ce qu’il Faut Connaître !
Tout savoir sur la célérité lumineuse La lumière, une constante fondamentale de l'Univers ? La Lumière, un élément clé de l'univers ? La lumière, une composante de la relation espace-temps La vitesse de la lumière est présentée comme une constante fondamentale de l'univers. ? Elle représente la vitesse maximale à laquelle l'information, l'énergie et toutes[…]
20 June 2023 ∙ 12 minutes de lecture
Les Puissances de Dix
Quelles sont les principales généralités à connaître sur les puissances de dix et l'écriture scientifique ? Les puissances de 10 permettent d'exprimer des nombres très grands ou très petits de façon plus simple et plus compacte. Par exemple : 💧Le nombre de molécules dans une goutte d'eau est environ égal à 6 000 000 000[…]
27 April 2023 ∙ 9 minutes de lecture

Vecteur Force
Qu'est-ce que le vecteur force : définition et exemples Généralités à propos du vecteur force Les effets de la force Une force appliquée à un corps peut modifier la vitesse. Une force appliquée à un corps peut modifier sa trajectoire. Qu'est-ce qu'un vecteur force ? Le vecteur force est un vecteur associé à toute force[…]
6 February 2023 ∙ 15 minutes de lecture
Traitement du Signal
Comment gère-t-on les signaux à l'entrée et à la sortie d'un oscillateur ? Les oscillateurs en physique-chimie En physique, il est possible de parler d'oscillateur lorsque l'on décrit un système qui évolue de part et d'autre d'un équilibre stable. En effet, les grandeurs qui décrivent le système vont varier. On peut prendre l'exemple du temps, on parle alors de variations[…]
6 February 2023 ∙ 13 minutes de lecture

Conversion d’Unités
Les méthodes de conversion des unités Les différentes unités L'ensemble des unités associées aux dimensions fondamentales constitue le Système International d'unités. Il s'agit du système MksA (mètre, kilogramme, seconde, Ampère), mais le Kelvin, le mole et le candela font aussi partie de ce système. Ces unités sont appelées unités légales. Elles sont universelles et connues[…]
7 October 2022 ∙ 10 minutes de lecture

Les Tests de Reconnaissance d’Ions
Commet faut-il procéder afin de détecter un atome ou une molécule à charge électrique D'une manière générale, un test de reconnaissance est utilisé pour confirmer ou infirmer la présence d'une espèce chimique dans un milieu (gaz, solution, etc). Il permet par exemple de vérifier la formation d'une espèce chimique lors d'une réaction chimique ou bien d'analyser la[…]
29 September 2022 ∙ 11 minutes de lecture

Exercice : Courants de Foucault
Comment fonctionne la conductivité électrique ? Les courants de Foucault, quelques rappels Les courants de Foucault sont des courants électriques qui se trouvent au centre d'une masse conductrice. Ces courants sont provoqués par la variation de champ magnétique extérieur qui traversent la masse ou par le déplacement de cette dernière au sein du champ. Histoire[…]
7 April 2022 ∙ 12 minutes de lecture