
Chapitres










Introduction
Pour effectuer une translation ou encore pour identifier le coefficient directeur d'une droite, les vecteurs nous offrent de nombreuses applications en géométrie. Commençons par définir ce qu'est un vecteur et étudions ses différentes propriétés et applications.
Définition d'un vecteur

Un vecteur est un objet mathématique que l'on représente graphiquement sous forme d'une flèche. En effet, un vecteur est défini par sa longueur (longueur du segment), sa direction (position, orientation de la flèche) et son sens (vers la droite ou la gauche). Il peut être noté de deux façons différentes : soit nous connaissons le point de départ A et le point d'arrivé B et on note le vecteur  soit nous n'avons aucune information sur le vecteur et nous le notons
soit nous n'avons aucune information sur le vecteur et nous le notons  Il est important de ne pas oublier la flèche afin de ne pas confondre avec la longueur du segment. En effet, le vecteur est de longueur AB.
Il est important de ne pas oublier la flèche afin de ne pas confondre avec la longueur du segment. En effet, le vecteur est de longueur AB.
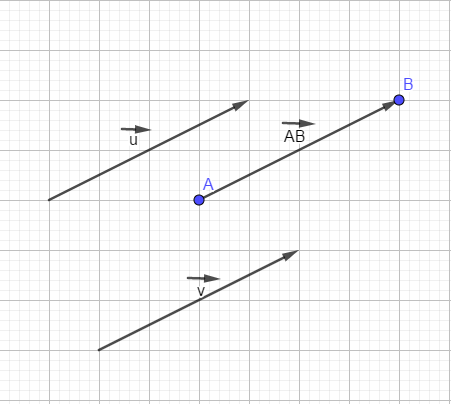
Il est inutile de savoir d'où part un vecteur. Par exemple, les vecteurs et  ci dessous sont tous égaux.
ci dessous sont tous égaux.
On appelle translation qui transforme A en B le déplacement rectiligne de longueur AB et de direction la droite (AB). En fait, cela correspond au vecteur On peut dire que est la translation de vecteur qui transforme A en B.
On appelle l'image B d'un point A par la translation de vecteur le point qui se trouve au bout du vecteur c'est à dire le point à l'extrémité du vecteur lorsque l'origine du vecteur est le point A.
Où trouver des cours de maths pour réviser avant une épreuve ?
Propriétés d'un vecteur
Le vecteur opposé du vecteur est  c'est le vecteur qui a même direction, même longueur mais qui est de sens contra ire à De la même façon, le vecteur opposé à est
c'est le vecteur qui a même direction, même longueur mais qui est de sens contra ire à De la même façon, le vecteur opposé à est  ce qui correspond au vecteur
ce qui correspond au vecteur 
Tout vecteur  correspond au vecteur nul. C'est un vecteur, il est donc caractérisé par sa direction, son sens et sa longueur, mais sa longueur est nulle.
correspond au vecteur nul. C'est un vecteur, il est donc caractérisé par sa direction, son sens et sa longueur, mais sa longueur est nulle.
Pour additionner deux vecteurs, on les met l'un au bout de l'autre, la somme des deux vecteurs est alors le vecteur qui part de l'origine du premier et qui arrive au bout du deuxième.
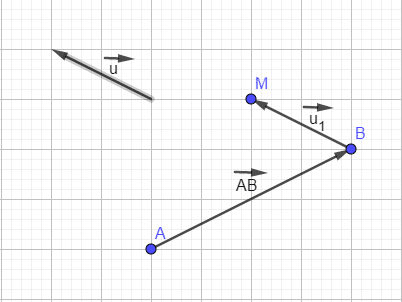
L'addition du vecteur et du vecteur donne le vecteur  d'après le graphique ci-dessus. On note
d'après le graphique ci-dessus. On note 
On obtient alors ce qu'on appelle la relation de Chasles, qui permet d'additionner des vecteurs : 
On a de la même façon la relation 
Pour soustraire deux vecteurs, on additionne le premier avec l'opposé du deuxième, c'est à dire on additionne le premier avec le deuxième que l'on a multiplié par (-1) ou encore le deuxième auquel on a inversé le sens.
On peut également multiplier un vecteur par un nombre, par un scalaire. Par exemple, si on multiplie un vecteur par 3 on obtient un vecteur de même direction, de même sens, mais dont la longueur est multipliée par 3. On le notera 
Vous cherchez des cours de maths seconde ?
Coordonnées d'un vecteur
Avec deux vecteurs perpendiculaires de même origine et de même longueur, on peut former ce que l'on appelle un repère orthogonal. Si de plus, les vecteurs  et
et  sont de longueur 1 (ou de norme 1), on dit que le repère est orthonormé. Souvent notée
sont de longueur 1 (ou de norme 1), on dit que le repère est orthonormé. Souvent notée  c'est le repère que nous utilisons habituellement pour tracer la représentation graphique d'une fonction, comme une droite par exemple. Ainsi, on peut repérer des points dans un plan à l'aide de coordonnées.
c'est le repère que nous utilisons habituellement pour tracer la représentation graphique d'une fonction, comme une droite par exemple. Ainsi, on peut repérer des points dans un plan à l'aide de coordonnées.
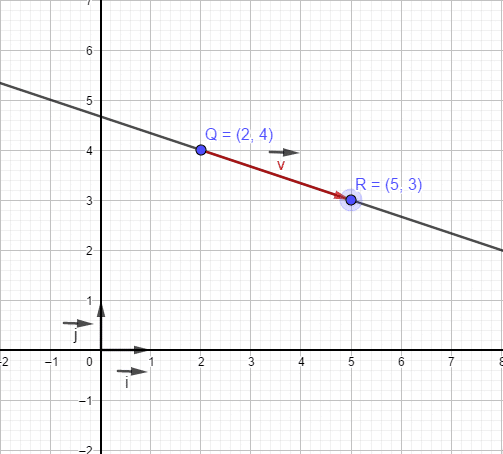
Graphiquement, les coordonnées d'un vecteur se déterminent en étudiant la distance à parcourir en abscisse et en ordonnée pour aller de l'origine à l'extrémité du vecteur. Ainsi, on regarde en partant de l'origine du vecteur de "combien on avance ou recule" (abscisse du vecteur) et de "combien on monte ou descend" (ordonnée du vecteur) afin d'atteindre le point à l'autre extrémité du vecteur.
Prenons un exemple, en déterminant graphiquement les coordonnées de notre vecteur  aussi appelé présent au dessus. En partant de Q, on avance de 3 et on descend de 1 pour arriver à R. Ainsi, le vecteur a pour coordonnées
aussi appelé présent au dessus. En partant de Q, on avance de 3 et on descend de 1 pour arriver à R. Ainsi, le vecteur a pour coordonnées 
Pour calculer les coordonnées d'un vecteur lorsque l'on connait les coordonnées des points aux extrémités du vecteur, on utilise la formule suivante :
Soient A et B des points de coordonnées respectives  et
et  Alors
Alors 
Par exemple, pour le vecteur on obtient 
On peut calculer la distance entre deux points A et B, notée AB, c'est à dire la longueur (aussi appelée la norme) du vecteur La formule est 
Cela se démontre en appliquant le théorème de Pythagore, où AB est l'hypoténuse.
Calculons la longueur QR. Cela donne 
On peut également déterminer les coordonnées du point situé au milieu d'un segment. Pour cela, il suffit de calculer la moyenne entre l’abscisse de A et de B et la moyenne entre l'ordonnée de A et de B. On appelle M le milieu du segment AB, cela donne 
Lorsque deux vecteurs ont même direction (ce qui correspond à "parallèles") on dit que les vecteurs sont colinéaires. Ainsi, deux vecteurs et sont colinéaires s'il existe un nombre k tel que  c'est à dire qu'un vecteur est un multiple de l'autre.
c'est à dire qu'un vecteur est un multiple de l'autre.
Par exemple, les vecteurs  et
et  sont colinéaires car
sont colinéaires car 
Le vecteur nul est colinéaire à tout vecteur. Lorsque les vecteurs et  sont colinéraires, le quadrilatère ABDC est un parallélogramme puisque les segment AB et DC sont parallèles et de même longueur.
sont colinéraires, le quadrilatère ABDC est un parallélogramme puisque les segment AB et DC sont parallèles et de même longueur.
Application au coefficient directeur d'une droite
Pour finir, revenons aux fonctions affines. On sait qu'elles peuvent être représentées dans un repère sous forme d'une droite puisqu'elles ont pour équation y=ax+b où a est le coefficient directeur de la droite et b l'ordonnée à l'origine. On remarque que le coefficient directeur de la droite se mesure graphiquement de la même façon que les coordonnées d'un vecteur.
En effet, pour le coefficient directeur on regarde en partant d'un point de la droite de "combien on avance ou recule", que l'on note  et de "combien on monte ou descend"
et de "combien on monte ou descend"  afin d'atteindre un autre point de la droite. Le coefficient directeur est alors
afin d'atteindre un autre point de la droite. Le coefficient directeur est alors 
On se demande alors quel est le lien avec les vecteurs ? En fait, le coefficient directeur correspond à la pente de la droite, c'est à dire l'inclinaison de la droite, ce qui correspond tout à fait à la définition que nous avons donné à la direction d'un vecteur. Ainsi, on dira que le vecteur est un vecteur directeur de la droite (AB).
Exercice
Déterminer les coordonnées du vecteur pour A(3;5) et B(4;1); pour A(-4;3) et B(5;2) et pour A(6;3) et B(1;-3).
Déterminer ensuite la longueur des segments [AB] respectifs.
Commençons par déterminer les coordonnées des vecteurs. On utilise la formule Répertorions les résultats dans un tableau :
| Coordonnées des points A et B | Coordonnées du vecteur AB |
|---|---|
| A(3;5) et B(4;1) | (4-3;1-5)=(1;-4) |
| A(-4;3) et B(5;2) | (5+4;2-3)=(9;-1) |
| A(6;3) et B(1;-3) | (1-6;-3-3)=(-5;-6) |
Maintenant, on peut utiliser les valeurs que l'on a obtenu pour calculer AB. On utilise la formule Comme on connait déjà les coordonnées du vecteur  On a simplement à calculer
On a simplement à calculer 
Répertorions les résultats dans un tableau :
| Coordonnées du vecteur AB | Longueur AB |
|---|---|
| (1;-4) | √(1²+(-4)²)=√(1+16)=√17 |
| (9;-1) | √(9²+(-1)²)=√(81+1)=√82 |
| (-5;-6) | √((-5)²+(-6)²)=√(25+36)=√61 |
Vous avez aimé cet article ? Notez-le !

")





Si vous désirez une aide personnalisée, contactez dès maintenant l’un de nos professeurs !
Bonsoir, j’aimerai bien comprendre comment déterminer l’ensemble des points E tels que :le vecteur AE et le vecteur AB soient volontaires. De plus, A B C sont trois points non alignés.
Bonjour je voulais savoir est ce que les composantes d’un vecteur sont toujours en colonnes et celles d’un point sont toujours en lignes? Quelle est la nuance de ces notations